



















News

Updated Product Sheets
7 February 2022
We updated our product sheets for several of our most popular products. New lay-out and up to date specifications, download them here.

HACO Kingsland reveals the new RPC (Robot Plasma Cutting) line
22 February 2019
Introducing the new Robot Plasma cutting line, able to process multiple profile and tube types in combination with sheet metal.

Q5 with impressive automatic sheet loading-unloading system
9 October 2017
Increasing the punching efficiency for Swedish customer CW Lundberg Mora.
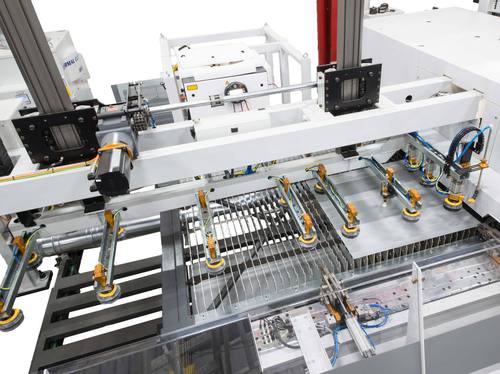
FL Series: automatic loading and unloading
2 October 2017
As modern fiber laser cutting processes tremendously reduce cycle times, especially for thin materials, automation of loading and unloading processes has become a must.

The impressive FTM 1000 x 7500 in action
27 September 2017
The FTM 1000 x 7500 lathe for our Australian customer has been tested and is now working it's magic.
About us
HACO KINGSLAND is a subsidiary of The HACO Group, a worldwide leader in CNC Machinery.
The HACO Group operates manufacturing plants throughout the world and have sales and service subsidiaries established in all major countries.
Our sales and service personnel are highly trained and customer orientated whose motivation is to find the best possible solutions for our customers.
We endeavor to ensure customer satisfaction at all levels and are well known for our proactive after- sales support.
Contact
-
UNITED KINGDOM
The Kingsland Engineering Co.
Weybourne Road, Sheringham,
Norfolk, NR26 8HE England
T +44 (0) 1263 822 153
F +44 (0) 1263 825 667
E sales@kingsland.com
VISIT OUR WEBSHOP! -
AUSTRALIA
Haco (Australia) Pty Ltd
16 Argong Chase
Cockburn Central WA 6164
T +61 (0)8 9456 1555
F +61 (0)8 9456 3555
E sales@hacoaustralia.com.au
VISIT OUR WEBSHOP!